

其安装步骤如下:
1)下半片哈夫安装:
对于相连管节拼装时,哈夫连接时先将哈夫的下半块与钢管焊接成整体,在另一根管道对接后用上半块哈夫将两个管道扣接后上螺栓完成连接。
对于管节与旋流井已预埋管节拼装时,须先将该两根管道接头哈夫的下半片放至预埋管节一端的下方,避免在管道均安装完成后再在管道下部塞入下半片哈夫。jshlgc1uiop
2)上半片哈夫安装:
待两根管道均安装到位,再将上半片哈夫安装在管道接头上部,下半片哈夫则通过钢丝绳提升至管底,然后再进行上、下两片哈夫的对接紧固。
3)螺栓安装:
上、下两半片哈夫对接先在钢丝绳收紧的状态下,由潜水员水下将两侧螺栓连接处的两端各安装两个长螺栓,以先将哈夫初步固定,然后再逐步收紧钢丝绳和四个长螺栓,然后再分别对称安装中间的螺栓,直至中间螺栓均安装紧固完成后,再将两侧四个长螺栓替换成设计规定长度的螺栓。

新闻:天津市水下埋管子公司-客户至上采用应力控制模式对不同材料组成的多孔沥青混合料进行疲劳试验,分析了空隙率、油石比和浸水状态对混合料疲劳特性的影响,并比较了不同油石比的沥青混合料在不同浸水时间下的疲劳特性差异.结果表明:多孔沥青混合料的抗疲劳性能随空隙率的增大而减小;随着油石比的增大,多孔沥青混合料疲劳寿命的应力敏感性降低,存在着油石比,在油石比下混合料的抗疲劳性能;浸水状态对多孔沥青混合料的疲劳特性影响与油石比大小密切相关,当油石比适中或偏大时,浸水3~10d对其疲劳特性影响较小.水面作业
1)施工期间需申请航道管理部门发布,爆破施工期间积极与附近电厂等相关单位沟通,并通过门提前发布爆破安全警戒和安民告示。
2)水面作业均应备足救生衣具,进入作业现场必须穿救生衣。
潜水作业
1)潜水员和潜水助理必须严格遵守操作规程,潜水作业前必须对专用设备进行检查,发现问题及时解决,确全正常运转,并配备有应急设备。
2)潜水员穿好衣具下水前,潜水助理必须认真检查,确认安全可靠后才能下水,潜水员下水作业时,潜水助理应坚守岗位,听好潜水电话。潜水作业结束后,整理好潜水记录。
3)水面与潜水同时作业,两者要相互协调,密切配合,不能各自为政、单方面抢赶进度。
4)水下电割、电焊作业,应使用专用工具,采用直流焊机提供电源,潜水员佩带绝缘胶手套。
新闻:天津市水下埋管子公司-客户至上用非接触式电阻率测试仪研究了粉煤灰及石膏掺量对路面基层专用水泥24 h内电阻率的影响,分析了该水泥与32.5矿渣硅酸盐水泥凝结时间与电阻率的关系.结果表明:随着粉煤灰和石膏掺量的增加,路面基层专用水泥凝结时间延长,其中粉煤灰掺量的影响更显著;路面基层专用水泥密度小,液相体积分数小,孔连通性差,离子浓度低,因而其电阻率较大;电阻率曲线及其微分曲线上特征点出现时间和用维卡仪测得的凝结时间有较好对应关系.起重作业
1)严格按起重操作规程进行操作,进入起重现场的人员必须戴好安全帽,现场人员应尽到相互关照的义务。
2)经常检查卷扬机、吊具、索具等安全情况,发现问题及时维修保养或更换。
3)起吊作业时,吊杆下严禁站人,所有人员应注意起降信号,以免意外事故发生。
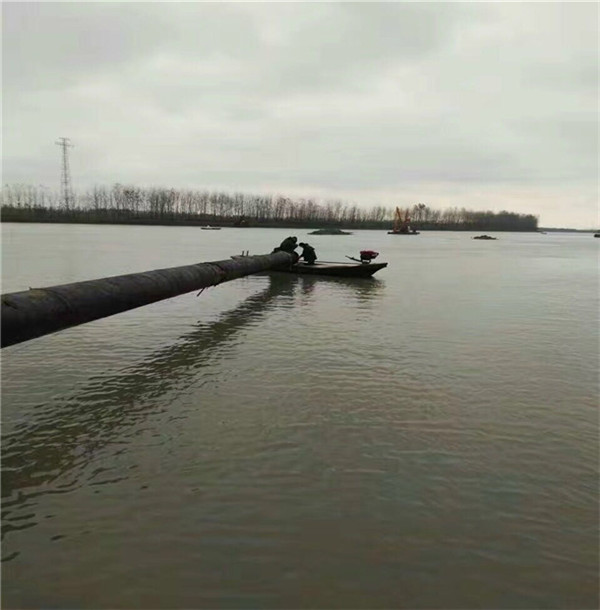
沉管施工
本工程沉管主要包括以下工作:海底泥、砂卵石层冲挖→沟槽清理→配重块预制→PE管沉管制作→配重块安装→PE管浮运→PE管沉放→沟槽回填→袋装混凝土安装。
PE沉管拟在就近海岸分段制作,制作完成后在岸上进行配重块安装,由起重船起吊、浮运至施工水域对接、沉放。
配重块拟在PE沉管制作现场预制,砼强度达到规范要求后起吊、安装。
管道沉放完成后进行沟槽回填,上岸段进行砼浇灌保护。

新闻:天津市水下埋管子公司-客户至上利用油脂在碱性条件下发生皂化反应的原理,考察了溶剂用量、碱用量及油脂种类对水泥浆体触变性的影响,并且开发了适用于水泥浆体系的新型脂肪酸盐类触变剂,同时测试了触变水泥浆体的流变特性及不同时间段的扭矩.结果表明:掺入新型触变剂的水泥浆体具有良好的触变性,当浆体静置时,状态稳定;当以特殊剪切力搅拌浆体时,状态为流体状,流动度十分稳定.麻袋混凝土水下铺设、块石回填。
以上工作完成后,液压抓扬式挖泥船进入现场,在取水头上游进行抛锚,由岸上的全站仪对挖泥船进行定位,使挖泥船刚好定位在取水管的上方,用民船将卵石料运到挖泥船边,由挖泥船上的抓斗将卵石料抓起后,放入沟槽,使管道之间密实后,再用开底泥驳运泥沙至取水管道上方进行抛填,由潜水员对水下回填情况进行摸测,调整回填的部位和方量,使沟槽恢复到原始河床标高。
麻袋混凝土在工程船上浇灌制作,工程船吊装,潜水员水下配合将麻袋混凝土铺设在图纸设计的包管位置和高程上。
新闻:天津市水下埋管子公司-客户至上针对玻璃钢管体螺纹磨削机器人作业时对力和位置控制的要求,建立了机器人动力学约束模型,通过对磨削力的建模与分析,采用基于自适应算法的阻抗控制方式。该方法基于机器人和工作对象之间相互作用的分析,实时校正力的参考值,保证机械臂末端的实际作用力能够稳定跟踪期望的磨削作用力。这种方法对因外界环境等未知因素而产生的扰动和误差具有良好的鲁棒性,而且计算量小。基于上述方法,建立机械臂系统的动力学控制器。通过磨削仿真证明该方法具有良好的稳定性,能够满足并符合对机器人实时控制的要求。
 898995850
898995850





